¶ Technology Roadmap Sections and Deliverables
¶ Roadmap Overview
This technology roadmap explores the application and use of radar sensors in autonomous vehicles (AV) and mobile robots. In a world where more of our everyday tasks are being automated and removing the need for human intervention, sensors (such as radars) are increasingly important to enable autonomous technological advancements. Mobile robots and autonomous vehicles alike need to sense objects and features in their surroundings to navigate and interact with the world; radar sensors can be used to accomplish this. This level 3 roadmap evaluates radar's interactions among level 2 functions such as power systems, control systems, and autonomous navigation, but will also introduce level 4 technologies within radar for further evaluation.
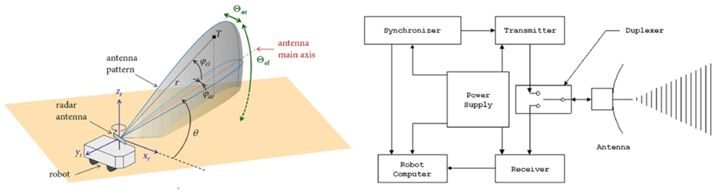
Radar within AVs and mobile robots works by emitting radio frequency waves into the environment. When the waves hit features in the scene, some energy is absorbed, some bounces away, and some bounces back toward the radar head. The radar head receives the reflected portions of the wave. By measuring the time-of-flight, doppler, and other attributes of the reflected wave, radars can estimate the distance to the object and its relative velocity. Some radar companies have developed unique algorithms to determine other attributes of features as well.
Radar is not the only option for exteroceptive sensing in robotics and autonomy; LiDARs and visible cameras are ubiquitous in the industry. Radar, however, has several advantages: long range, ability to accurately sense something’s relative velocity, low power consumption, and all-weather performance. Despite these advantages, radar has been a recent source of contention among the AV and ADAS developer community. Radar does not perform as well as other sensors when measured by traditional sensing FOMs, such as resolution and depth accuracy. The direct output of radars is often incompatible with many classical robotics detection algorithms, which makes it hard for many established firms to integrate with their systems. For these reasons, many AVs/ADASs use radar alongside sensor fusion or reject radar technology outright. This technology roadmap explores the benefits and opportunities to implement radars while achieving the goals of autonomous vehicles and mobile robots.
¶ References
- https://www.radartutorial.eu
- https://www.researchgate.net/figure/Position-of-radar-on-a-robot-Radar-is-typically-located-at-a-height-hr-between-1m-and-3m_fig5_301273977
- https://man.fas.org/dod-101/navy/docs/es310/radarsys/radarsys.htm
¶ Design Structure Matrix (DSM) Allocation
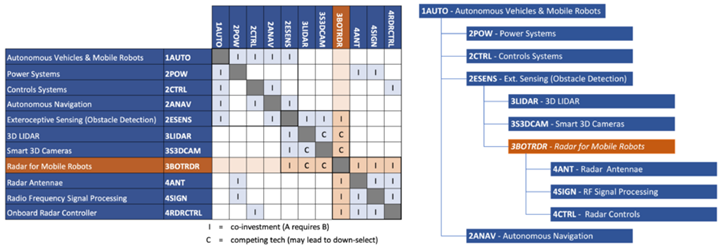
The DSM below shows the relationships between the 3RDRBOT technology roadmap and other roadmaps of interest. 3BOTRDR (radar for robotics & AVs) is a level 3 roadmap within the level 2 technology 2ESENS (exteroceptive sensing and obstacle detecting). The highest level initiative is 1AUTO: robotics & autonomous vehicles.
The roadmap hierarchy is shown to the right of the DSM from which it was extracted, below.
¶ Roadmap Model using OPM
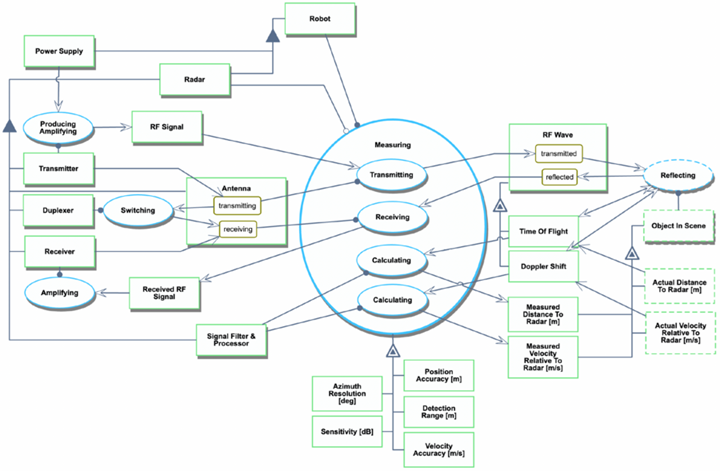
The Object-Process-Diagram (OPD) of the 3BOTRDR Radar for Robotics & AVs is provided in the figure below. This diagram captures the main object of the roadmap (Radar), its purpose, its various processes and instrument objects, and its characterization by Figures of Merit (FOMs).
The autogenerated Object-Process-Language (OPL) is included (right) for clarity.
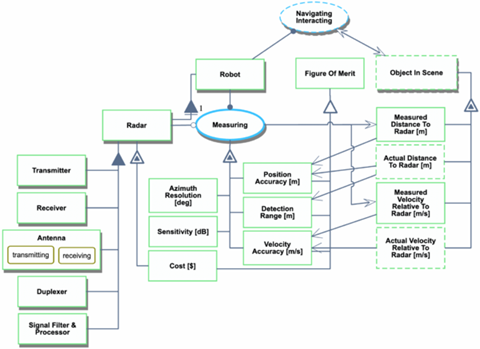
The "Measuring" Process is further detailed to show sub-processes and their instrument objects. Some objects, processes, and relationships are removed for clarity.
The autogenerated Object-Process-Language (OPL) is included (right) for clarity.


¶ Figures of Merit
¶ Primary and Secondary FOMs
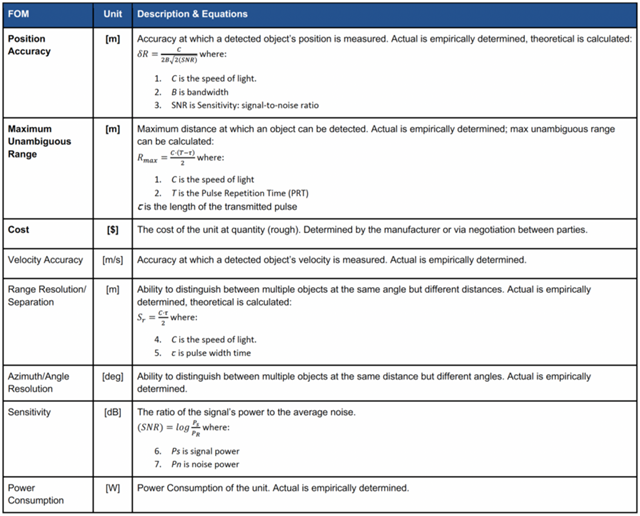
The table below lists some Figures of Merit (FOMs) by which radar can be assessed. For exteroceptive sensing, primary FOMs for radar are shown in bold, followed by the FOMs that are currently considered secondary.
¶ Governing Equations
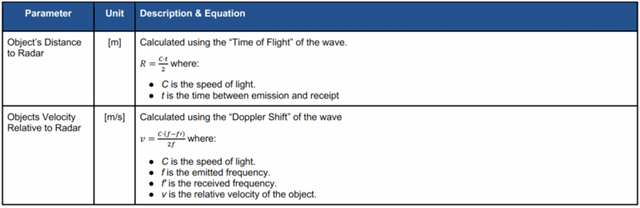
The table below shows two governing equations showing how radar can be used to measure an object's relative distance and velocity.
¶ Progress Over Time
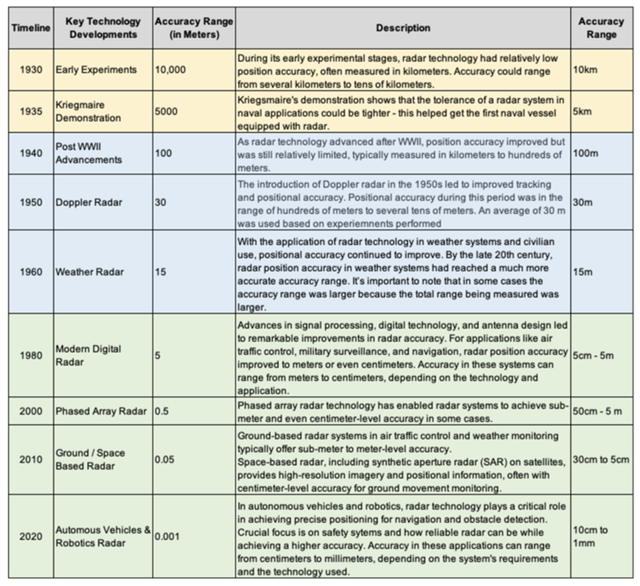
The history of radar is quite fascinating as its use case has evolved significantly over time. As this use case evolves, a higher measurement accuracy is achieved based on that sprint technology development. Below is a table with a high-level overview of radar’s Position Accuracy [m] performance improvements over time.
Model Rate of Improvement
During the analysis of the rate of improvement, we realized that there were three major innovation spurts for this technology. This development timeline has been plotted in the graph below, and a best-fit model rate was determined. Radar technology an excellent example of how the technology acceleration for development also can change over various periods in history based on the technology’s use case.
The first occurred during the initial development from 1930-1940 – shown in yellow. The second occurred post WWII, and there was an infusion of interest in the technology; the development trajectory exponentially increased – shown in blue. The third occurred in the 2000s when centimeter level accuracy was achieved and the technology use case was expanded to ground & space applications (prior it was more weather-focused) – shown in green.
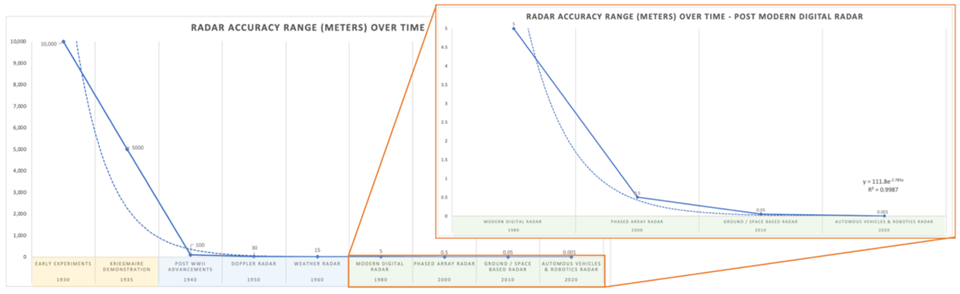
Theoretical Limit
Several fundamental factors influence radar technology’s theoretical limit and accuracy. Based on the graphs above, we can achieve sub-millimeter accuracy with the current technology. This was determined using the best-fit line from the last graph (post-modern development).
However, this depends on the subsequent technology acceleration, as the overall technological environment constrains performance. As an example, radar right now is limited by the wavelength of the electromagnetic waves it uses. The radar’s ability to resolve objects depends on the wavelength, with shorter wavelengths allowing for finer resolution. However, as wavelengths become extremely short (e.g., X-rays or gamma rays), the radar’s ability to penetrate materials and provide helpful information may decrease.
Ultimately, the theoretical limit of radar accuracy is a complex concept that depends on many factors, and it is likely to continue improving as technology advances. As electronics and computing continue to decrease in size and increase in performance, this will jumpstart the next technology evolution. The projections based on the above best-fit lines, show that we can achieve sub-millimeter accuracy with reliable radar systems to help jumpstart a robotics technology evolution for autonomous solutions. On the traditional S-curve (shown in Figure 4.15), the technology is in its rapid progress stage. As the backend technologies continue to develop, they kickstart the takeoff phase. At this moment, it seems like we have finished an initial takeoff and are making rapid progress; however, the moment that electronic technology improves, we will likely go into another spiral of incubation.
The technology continues to develop in various applications – the latest developments are primarily occurring in the automotive space applications. This is because those industries are starting to rely on radar as a primary sensing method – as radar continues to evolve and become a more reliable/safe system, it will likely be expanded in its use case. For example, Radar technology is increasingly integrated into automotive applications for advanced driver-assistance systems and autonomous vehicles. Automotive radar systems can provide high-precision positioning and object detection to enhance vehicle safety and automation, in which radar plays an important role. Similarly, advances in radar components, such as antennas, transmitters, and receivers, improve performance and accuracy in various radar systems, affecting multiple applications (automotive, space, weather, etc.)
¶ References
- https://www.radartutorial.eu/
- https://www.tutorialspoint.com/radar_systems/radar_systems_doppler_effect.htm
- G. Galati and P. van Genderen, "History of radar: The need for further analysis and disclosure," 2014 11th European Radar Conference, Rome, Italy, 2014, pp. 25-28, doi: 10.1109/EuRAD.2014.6991198.
- Magosi ZF, Li H, Rosenberger P, Wan L, Eichberger A. A Survey on Modelling of Automotive Radar Sensors for Virtual Test and Validation of Automated Driving. Sensors (Basel). 2022 Jul 29;22(15):5693. doi: 10.3390/s22155693. PMID: 35957250; PMCID: PMC9370944.
- V. S. Chernyak and I. Y. Immoreev, "A Brief History of Radar," in IEEE Aerospace and Electronic Systems Magazine, vol. 24, no. 9, pp. B1-B32, Sept. 2009, doi: 10.1109/MAES.2009.5282288.
- https://www.britannica.com/technology/radar/History-of-radar
- https://www.kdcresource.com/insights/the-evolution-of-radar-systems-a-cornerstone-of-modern-technology/
- https://training.weather.gov/nwstc/NEXRAD/RADAR/Section1-1.html
¶ Alignment with Company Strategic Drivers
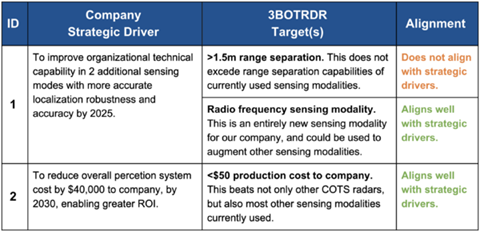
The “Company” is a privately held autonomous robotics company with a mission to bring to market the world’s safest mid-sized mobile robotics platform by 2030. To achieve this mission, we must consider technological advancements at multiple levels of 1AUTO. Improvement to the 3BOTRDR technology will improve the multi-modal sensing capabilities of our organization and allow more robust, safe operation at our highest level. The table below shows the two main strategic drivers, and their necessary alignment of the 3BOTRDR technology roadmap.
¶ Positioning of Company vs. Competition
The table below shows a summary of other both RADARs and LiDARs that could be used to perform similar functions with regards to autonomous vehicles.
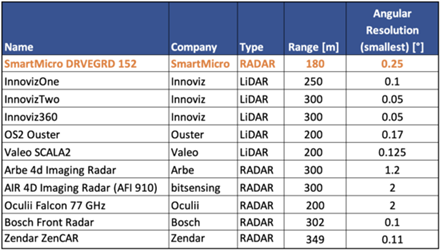
While RADAR was initially used for autonomous vehicles and mobile robots, advanced technology and improved capabilities of LiDAR have made it more popular in recent years. The range of both RADARs and LiDARs can be anywhere from short 10m distances up to 350m but they differ in resolution, precision, and detection. The LiDAR definitely has sharper angular resolution and better accuracy due to its short wavelength. LiDAR uses laser light and the returning pulse off an object to measure the distance while RADAR uses radio waves to measure the shift in the frequency. On the contrary, RADAR is preferred for reliability in long distance and under adverse weather conditions.
Error creating thumbnail: File missing – File missing when checked in Oct 2025
The shift towards more angular resolution is linked to advancements in technology and capabilities of these systems. The improved technology in LiDAR makes it generally more accurate but the cost difference makes RADAR a popular choice even today. The model improvements that Innoviz has made are seen on the top left corner. They continued to refine both the angular resolution while adding more range to each model update. This has proven favorable as they are considered a leader and key partner for OEMs in autonomous vehicle application.
RADARs coming from Zendar with their ZenCAR model as well as Bosch's Front Radar are proving to be at the front of the pack when it comes to both range and angular resolution. Innoviz360 is also in the top 3 for range and resolution, and offers a 360 degree field of view which is advantageous. Updating from RADAR to RADAR can be more favorable for some companies as the rest of their system may be better suited, and as the graph shows, RADAR technology has advanced with more resolution while pushing towards the 400m+ range. As technology continues to advance, the drive for more resolution, at even a longer range, for a low cost will be the goal.
¶ Technical Model
To better understand the feasibility of technology performance targets, we must understand the correlation between key FOMs and the technical/architectural design decisions that must be made.
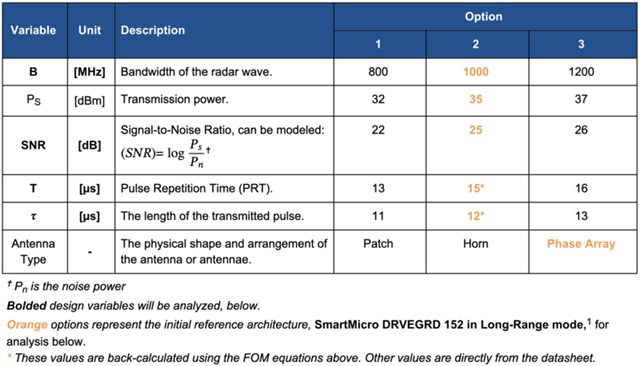
¶ Morphological Matrix (Design Variables)
Technical design variables/decisions for 3BOTRDR are described in the table below.
¶ Sensitivity Analysis
Error creating thumbnail: File missing – File missing when checked in Oct 2025
To understand the sensitivity of our three key FOMs to the relevant design variables, we analyze using the math shown in the thumbnail on the right. The results of the analysis are shown in the tornado chart below. Our reference architecture is again the SmartMicro DRVEGRD 152 in long-range mode.
Error creating thumbnail: File missing – File missing when checked in Oct 2025
The analysis above shows how changing four chosen design variables impacts the three key FOMs. Note that this analysis does not fully represent the impact on every FOM.
- A decrease in Length of Transmitted Pulse: 𝜏 [µs], improves a Radar's Range Resolution/Separation [m] by 1 [µs/m], but reduces its Max Unambiguous Range [m] by 4 [µs/m]. This design variable creates tension between these critical FOMs and should be carefully considered when designing a Radar for this application.
- An increase in Pulse Repetition Time: T [µs] improves a Radar's Max Unambiguous Range [m] by 5 [µs/m]. This design variable is a good candidate for incremental improvements in this application because small improvements may introduce large gains.
- An increase in Bandwidth: B [MHz] improves a Radar's Position Accuracy [m] by 0.02 [m/MHz]. This design variable is a good candidate for incremental improvements in this application.
- An increase in Signal-to-Noise Ratio: SNR [W/W, -] improves a Radar's Position Accuracy [m] by 0.0009 [m]. This design variable is a good candidate for incremental improvements in this application, but it may be prudent to focus on Bandwidth improvements instead because the potential upside is greater.
¶ References
¶ Financial Model
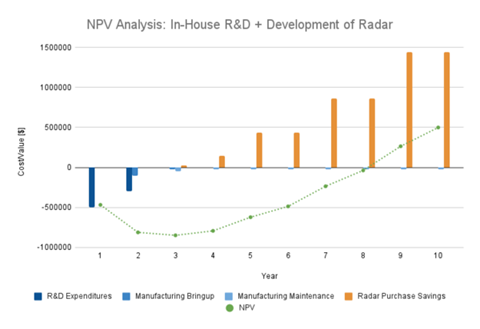
One significant advantage of manufacturing Radars in-house is the purchase savings of the units compared to COTS Radars. An NPV analysis was conducted to estimate the approximate break-even date if our company were to develop and manufacture Radar units for use in our own autonomous bases. This analysis shows that we reach a positive cash flow at approximately year 8.
Another business model could be to sell our Radar units as COTS for other firms. Assuming an appropriate pricing structure of $200 per Radar, we can see that we can break even slightly earlier, just before the start of year 8. This alternate plan doesn't significantly impact the business but could be worth considering.
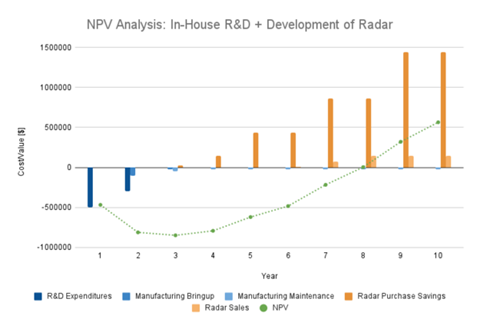
These analyses don't represent additional value to the firm such as control over sensing fidelity, improved capability in this technical area, and other strategic drivers.
¶ List of R&T Projects
The growth of radar use in autonomous vehicles continues to rise throughout the last few decades, and in parallel the R&T portfolio explores a number of improvements to the current technology to meet and improve future demand. The primary focus on technology improvements look to improve the imaging and resolution, improve transmission power, as well improve the sensitivity. These projects have been determined based on the technical decisions proven to have the most impact on several FOMs, including range resolution, range, sensitivity and position accuracy.
The first project is looking to improve the image and resolution of the radar will impact the range resolution which will in turn make the radars more accurate. This work is will require hardware upgrades and look at the number of antennas. The second project will look at improving transmission power which has an impact on the maximum range of radar performance. The range resolution will also improve with greater power therefore together these first two projects have a substantial upside if implemented in the next few years. The third project to prove the sensitivity of the radar will focus on receiver noise and designing an enhanced system where undesired signals are filtered out.
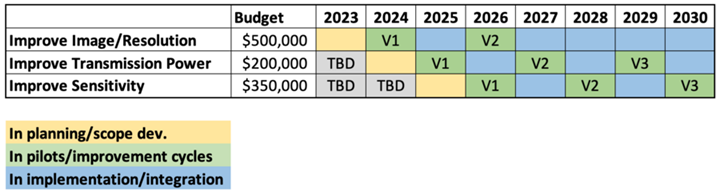
Execution of these projects will take on a phase approached as they need to integrate together and some may require additional iterations due to currently unknown constraints.
¶ Key Publications, Presentations and Patents
In searching related patents and publications in the application of radar for AVs and robotics, we can better understand industry trends and "technology push" drivers. Below is a summarized list of Patents and publications found.
¶ Patents (Highlights)
Patent 1: Obstacle Following Sensor Scheme For A Mobile Robot
- USPTO Link: https://patentcenter.uspto.gov/applications/12486820?application=
- Patent No: US 8,565,920 B2
- Assignee for Publication: iRobot Corporation, a Massachusetts corporation
- Date of Patent: October 22, 2013
- Filed: June 18, 2009
- CPC Code: G05B 19/04
- This CPC code is used to classify patents related to control or regulation systems in the field of control of mechanical structures, with a particular emphasis on a specific aspect or application within that field.
- Relevancy / Description: This patent was one of the founding patents for the iRobot Roomba Robots and describes the obstacle detection sensor system. It discussed how it utilizes an emitter to detect an obstacle and how the sensor arrangement adjusts the mobile robot's position and trajectory based on the new information. This patent also describes how the robot's performance changes based on the obstacle's size and location relative to other key features in the room. This patent sets the stage for utilizing complex sensor arrangements to adjust robotic mechanical systems. While it does not explicitly state what type of sensor can be used in the system (it is open-ended), the theory and obstacle avoidance scheme can be applied in philosophy to many other systems. The field of this invention is specific to an autonomous robot, so it will be important if this work is leveraged as prior art to ensure there are enough critical new features specific to radar implementation that differentiate it from this work.
Patent 2: High-Resolution Doppler Collision Avoidance Radar
- USPTO Link: https://patentcenter.uspto.gov/applications/13414299
- Patent No: US 9,063,225 B2
- Assignee for Publication: Toyota Motor Corp, Michigan Technological University
- Filed: March 7, 2012. Expired: June 23, 2023 (due to Failure to Pay for Maintenance Fees)
- CPC Code: G01S 13/345
- This code is for patents related to radio navigation, determining distance or velocity using radio waves, and similar technologies. The "345" part of the code represents a more specific aspect or application within this field.
- Relevancy / Description: This patent describes a vehicle collision avoidance system utilizing chirp waveforms and the frequency difference between transmitted and echo signals. These data points combine to create a collision avoidance radar system for a vehicle. This patent is quite interesting as the technical concept is simple and can be applied to larger systems. Based on the images shown and where the technology is today, it is likely that this alone is not enough for a vehicle collision avoidance system as it heavily relies on the accuracy band of the radar measurement. This may be why Toyota did not extend the application and pay the maintenance fees. However, as technology evolves and the accuracy of radar systems improves, this may be able to be leveraged in concert with other radar sensors/systems/algorithms for collision avoidance schemes – especially since the patent has expired.
Patent 3: Systems and methods for safe and reliable autonomous vehicles
- USPTO link: https://patentcenter.uspto.gov/applications/18076543
- Patent No: 18,076,543
- Assignee for Publication: NVIDIA Corporation
- Filed: December 7, 2022
- CPC Code: G05D1 0248
- This code is to classify patents related to controlling or regulating systems that involve non-electric variables.
- Relevancy / Description: This patent describes how LIDAR/RADAR and other sensing technologies can be combined to create a diverse and redundant safety system to meet functional safety standards. While the current application focuses on a use case of automotive vehicles, this can be applied to any robotic technology where a functional safety system is necessary (ex, safety-critical machinery). This patent specifically discusses how to design a complete platform to collect data from multiple sources, compute, and store it so the following machine process can utilize the information. What is also interesting about this patent is that if you look up other patents in this same CPC code, we find similar patents in different fields. For instance, sister patents focus on similar research and technologies but are in the large-scale agriculture space.
¶ Papers (Highlights)
Paper 1: Collision Avoidance System for Automobiles
- Paper link: https://www.jstor.org/stable/44611097
- Published: 1979
- Journal: Society of Automotive Engineers
- Relevancy / Description: This is one of the older papers that architects, at a high level, how a radar collision avoidance system could work within automobiles. At the time of this article, collision avoidance systems were not typical and this paper offered multiple ways they could be developed. One interesting idea they propose is having the entire infrastructure system (sensors, compute etc) be offboard so all vehicles could leverage a similar system. While this may be infeasible, it is an interesting concept. Additionally, it describes cooperative systems where there is a mixture of onboard and offboard systems working together to determine obstacle locations and how to avoid them. To put the ideas to a test, they did conduct and experiment on experimental vehicles equipment with a prototype collision avoidance radar systems. The paper proved the concept was feasible and that within a large radar range, it would work. While many of the technical specifics of this paper have evolved over time, the architectures described and experiment methodologies can serve as inspiration for future experiments.
Paper 2: Automotive radar 4D Point-cloud Imaging with 2D Sparse Array
- Paper link: https://ieeexplore.ieee.org/document/10028211
- Published: 2021
- Journal: 2021 CIE International Conference on Radar (Radar)
- Relevancy / Description: This paper discusses a novel algorithm that uses the standard output of a MIMO phase array radar system (relative range, relative velocity, azimuth, and elevation of the detected object), and produces a 4D point cloud image. This output transformation is valuable in robotics because often, “traditional” or “classical” robotics algorithms heavily utilize point clouds. If the concept described in this paper can be implemented and validated, we can more easily fuse radar systems’ detections with our existing sensing and algorithms.
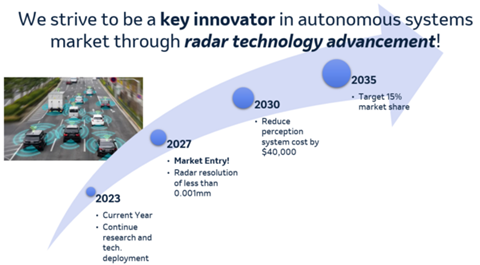
¶ Technology Strategy Statement
We aim to advance our radar technology to enhance autonomous mobile robots' navigation and perception capabilities, solidifying our position as a key innovator in the autonomous systems market by 2035. We plan to achieve market entry by 2027, undergo refinement and optimization until 2030, and target a substantial % market share of 15% by 2035.
To realize this goal, we will aim to elevate our radar systems' accuracy while maintaining functional safety requirements, enabling robots to navigate complex environments with heightened accuracy and safety.
By 2027, our target is to achieve a radar resolution of less than 0.001 mm at providing our robots with an unprecedented level of real-time environmental understanding. By 2030, we aim to reduce the overall perception system cost by $40,000.
Our technology strategy encompasses rigorous testing, continuous improvement, and collaboration with industry partners to stay at the forefront of autonomous robotics. By investing in these projects, we anticipate advancing our radar technology's capabilities and contributing significantly to the evolution of autonomous systems in various industries.