Difference between revisions of "Autonomous Underwater Vehicle"
Jump to navigation
Jump to search
| Line 5: | Line 5: | ||
==Design Structure Matrix (DSM) Allocation== | ==Design Structure Matrix (DSM) Allocation== | ||
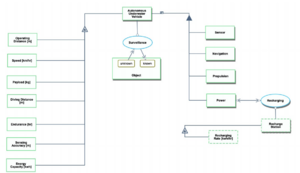
==Roadmap Model using OPM== | ==Roadmap Model using OPM== | ||
This diagram captures the main object of the roadmap (Autonomous Underwater Vehicle), its various instances including its decomposition into subsystems (Sensors, Navigation, propulsion, Battery, etc…), its characterization by Figures of Merit (FOMs) as well as the main processes (Surveying, Recharging, etc). | This diagram captures the main object of the roadmap (Autonomous Underwater Vehicle), its various instances including its decomposition into subsystems (Sensors, Navigation, propulsion, Battery, etc…), its characterization by Figures of Merit (FOMs) as well as the main processes (Surveying, Recharging, etc). | ||
[[File:AUV OPM.png| | [[File:AUV OPM.png|left|frameless]] | ||
==Figures of Merit (FOMs)== | ==Figures of Merit (FOMs)== | ||
Revision as of 10:20, 1 October 2020
Roadmap Overview
Throughout history, the ocean has been a vital source of sustenance, transport, commerce, growth, and inspiration. Yet for all of our reliance on the ocean, more than eighty percent of this vast, underwater realm remains unmapped, unobserved, and unexplored. AUVs provide great opportunities for exploring our oceans. An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring input from an operator.
Design Structure Matrix (DSM) Allocation
Roadmap Model using OPM
This diagram captures the main object of the roadmap (Autonomous Underwater Vehicle), its various instances including its decomposition into subsystems (Sensors, Navigation, propulsion, Battery, etc…), its characterization by Figures of Merit (FOMs) as well as the main processes (Surveying, Recharging, etc).
